-
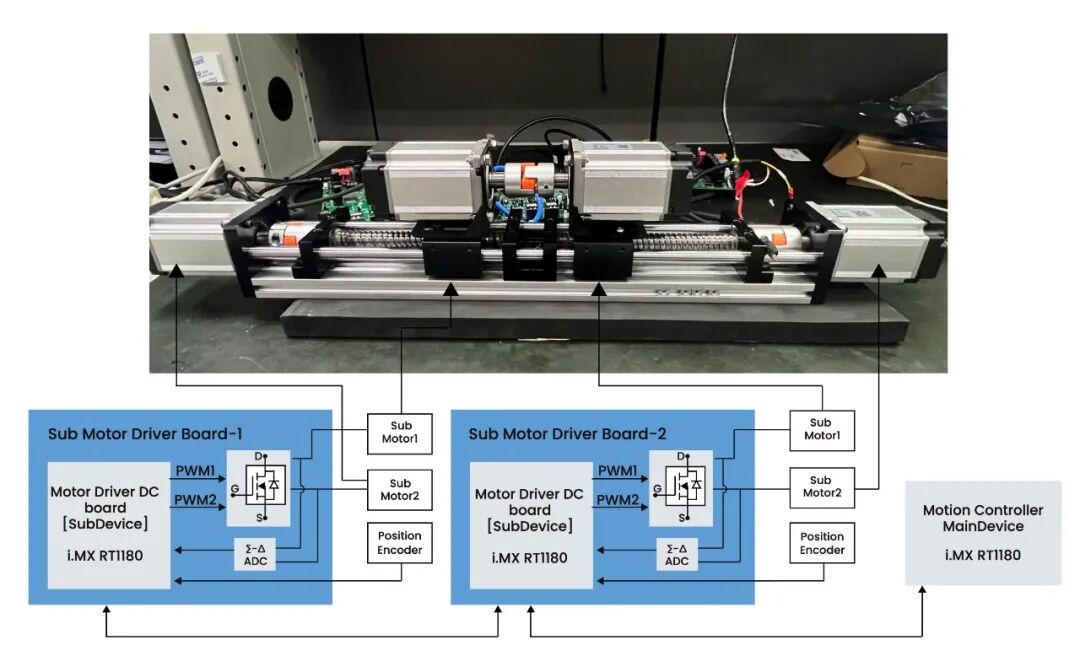
基于恩智浦i.MX RT1180芯片的EtherCAT+伺服电机控制方案
i.MX RT1180是恩智浦最近推出的一款高性能跨界处理器,其中包含了300MHz的Arm Cortex-M33核以及800MHz的Arm Cortex-M7核,集成了多种网络功能如时间敏感网络 (TSN) 交换机、EtherCAT SubDevice控制器等。同时,芯片内部集成了先进的电源管理模块,便于降低复杂的外部电源设计,并且还提供了多种外部存储接口和丰富的外设。 工业以太网在工业自动化中的应用 工业以太网将以太网技术延伸至工业控制场景,主要应用于工厂自动化、过程自动化、智能仓储与物流、能量管理等...
-
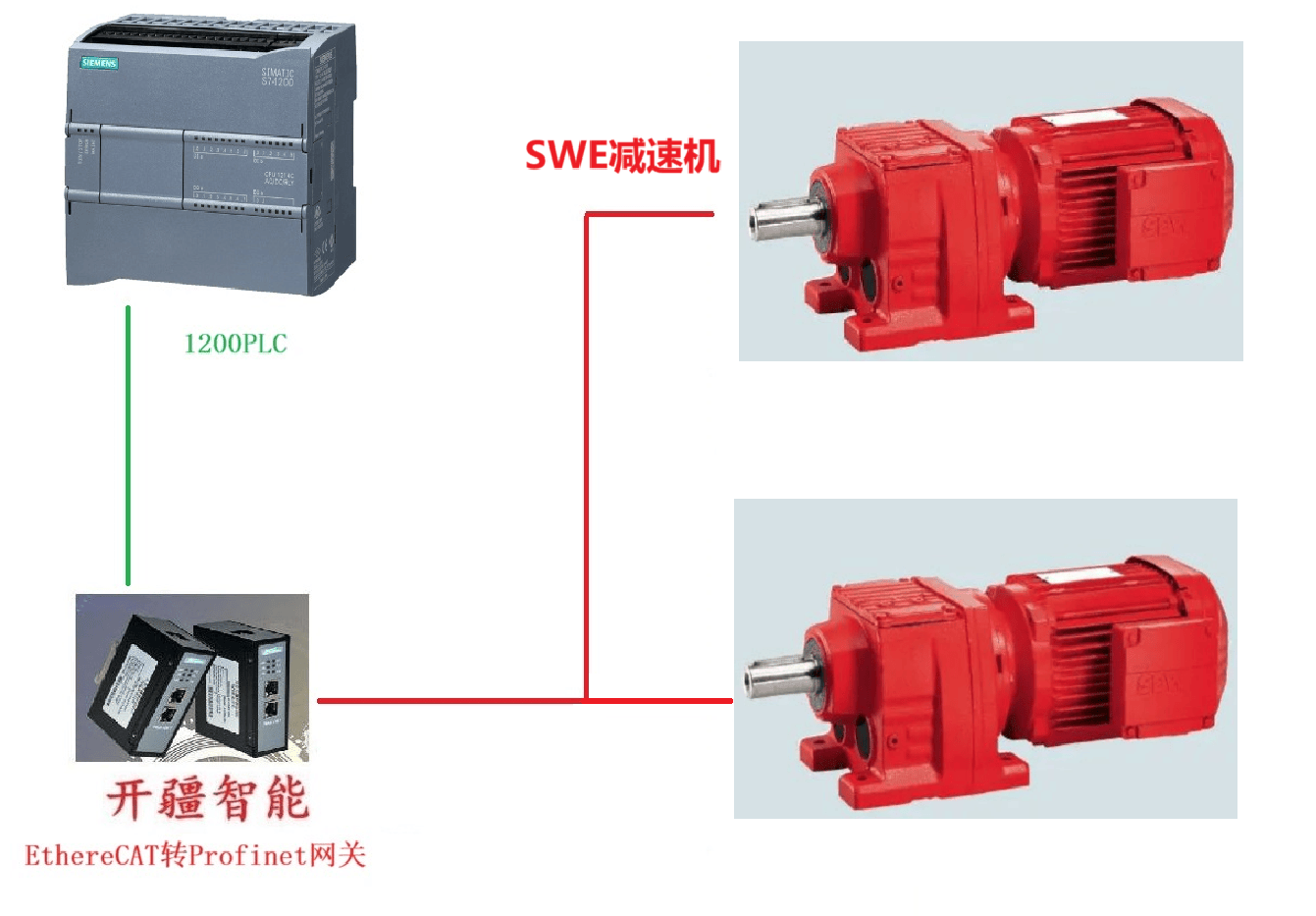
开疆智能Profinet转EtherCAT网关连接SWE减速机配置案例
该案例是西门子PLC通过Profinet转EtherCAT网关对SWE减速机进行操控。网关数据通过Profinet网络发送到作为从站的网关,经转换后作为EtherCAT主站发送到减速机。 网关配置: 打开网关配置软件“EtherCAT Manager”并新建项目。根据不通网关型号也可选择ModbusTCP,Ethernet或者CCLINKIE等,这里选择PN2ECAT 将伺服驱动器的ESI文件导入进网关配置软件,将从站设备添加进网关配置。 设置网关在Profient一侧的设备名称...
-
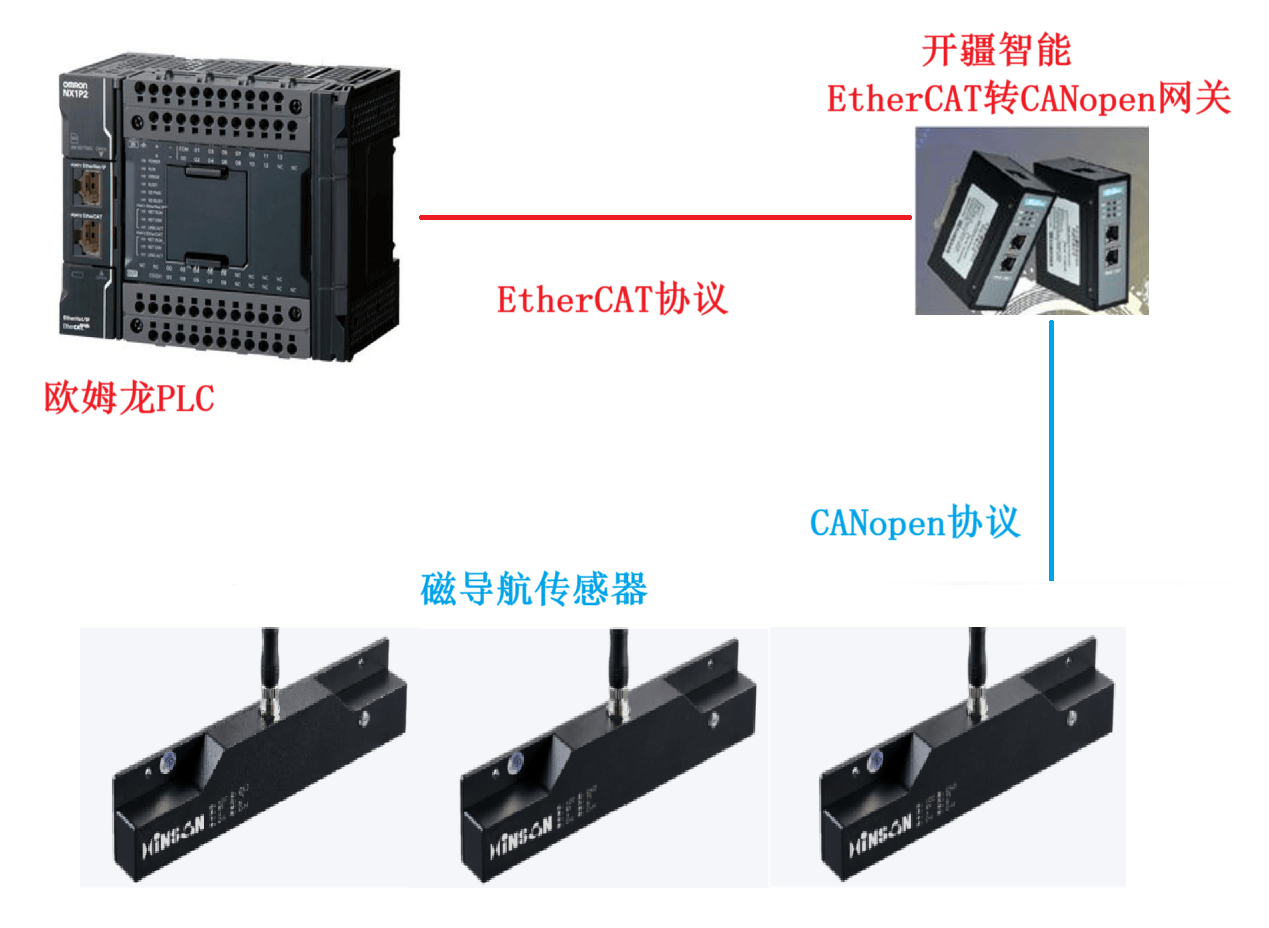
开疆智能EtherCAT转CANopen网关连接磁导航传感器配置案例
本案例是国内的AGV厂家,需要将CANopen协议的磁道传感器与欧姆龙PLC进行通讯,由于PLC使用的是EtherCAT协议,故选择了EtherCAT转CANopen网关。 具体配置过程如下: 网关配置 下一步进行网关的配置。打开网关配置软件“CANopen Configuration Studio”新建项目选择“ECAT-CANopen” 设置网关CANopen一侧的波特率以及通讯周期参数,如果不使用周期模式可以填0 设置网关的字节顺序下载IP地址以及掉线后数据处理方式。...
