上期回顾:负压的产生方式
本期内容
风扇,作为电机细分领域中的一个分支,因其控制方式简单,应用简便,在散热领域有着举足轻重的地位。其应用的领域几乎覆盖了我们日常的生产生活中每一环:如消费类笔记本电脑中的散热风扇,工业类设备中的风冷散热器,以及汽车中的座椅通风风扇等。
其中,单相风扇因其绕组方式简单,成本较低,在小功率类别风扇中有着尤为广泛的应用。今天给大家分享:单相风扇的换相应该是超前还是滞后?
01无刷风扇电机的运转过程
我们知道,无刷风扇电机持续运转的过程,实质上是定子绕组周期性通过相反方向的电流,以产生方向周期性时变的磁场,以带动转子永磁体在感应磁场中定向旋转的过程。
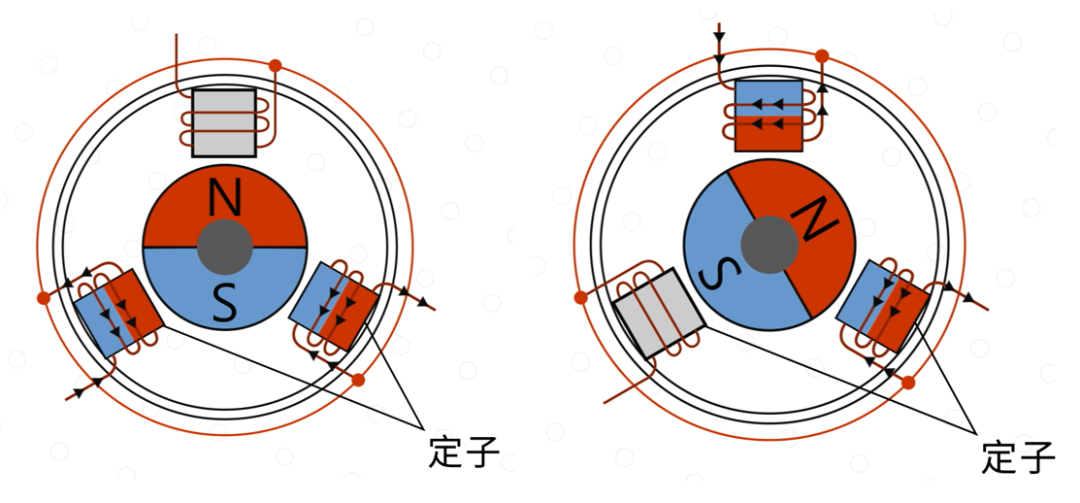
图2:无刷风扇电机持续运转过程
对单相风扇电机而言,电流方向是通过H桥的通断来控制,转子位置通过霍尔传感器的输出来判断,而H桥的通断控制,是基于霍尔的传感信号,因此霍尔传感信号是驱动信号和转子实时位置之间的桥梁,其正确的反馈是风扇电机能否顺利控制运转的基础。
具体示意图如图所示,以电机转子逆时针为旋转方向:
当转子处于图3位置时,此时根据霍尔的摆放位置,霍尔输出处于从低到高的上升沿,此时为保证转子逆时针旋转,电机绕组应该流过从OUT1流向OUT2的电流,H桥中的SW1和SW4闭合;
图3:示意图1
当转子旋转到图4位置时,此时霍尔输出变为从高到低的下降沿,此时电机绕组电流方向应该从原先的OUT1到OUT2,转变为OUT2流向OUT1,此时SW2和SW3闭合;
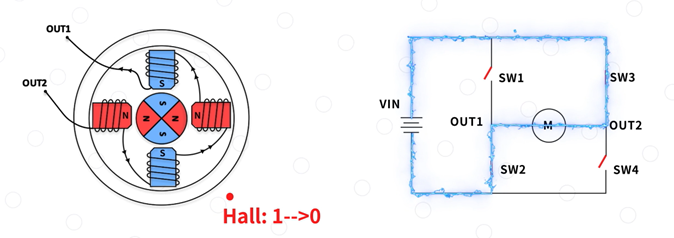
图4:示意图2
单相风扇的换相过程就是这样一个基于霍尔信号高低电平切换从而切换绕组电流的流向的过程。
02为什么需要对换相过程做超前或是滞后的角度补偿?
以上这样一个换相过程看似是十分理想的情况,然而,为什么我们需要对换相过程做超前或是滞后的角度补偿呢?
让我们看向单相风扇的等效驱动电路:
我们把两相施加的等效电压分别设为Out1和Out2,定子绕组上产生的感应电动势为BEMF,流过两相间的相电流为Io;由电压公式,可得到两相间等效电压Out1-Out2,等于两相回路上的感应电动势BEMF,加上相电流Io与绕组回路上的等效阻抗之积;对于风扇定子绕组来说,等效阻抗由等效电阻R和等效电感L两部分组成。
由此,我们可以通过矢量图,得到感应电动势和相电流的关系,由于绕组回路上这个电感分量的存在,实际此时感应电动势是超前于相电流一个角度θ的。
图5:单相风扇换相等效驱动电路图和矢量图
我们也可以通过波形图来表征这个过程:
如图6,在霍尔高低电平切换时风扇换相,等效电压OUT1-OUT2通过零点,反电动势此时和等效电压处于同相位;由于绕组回路中电感分量的存在,相电流Io滞后于感应电动势一个角度θ;这部分的滞后,会造成相电流和感应电动势的乘积有一个负值部分,从而电机会产生“负转矩”。
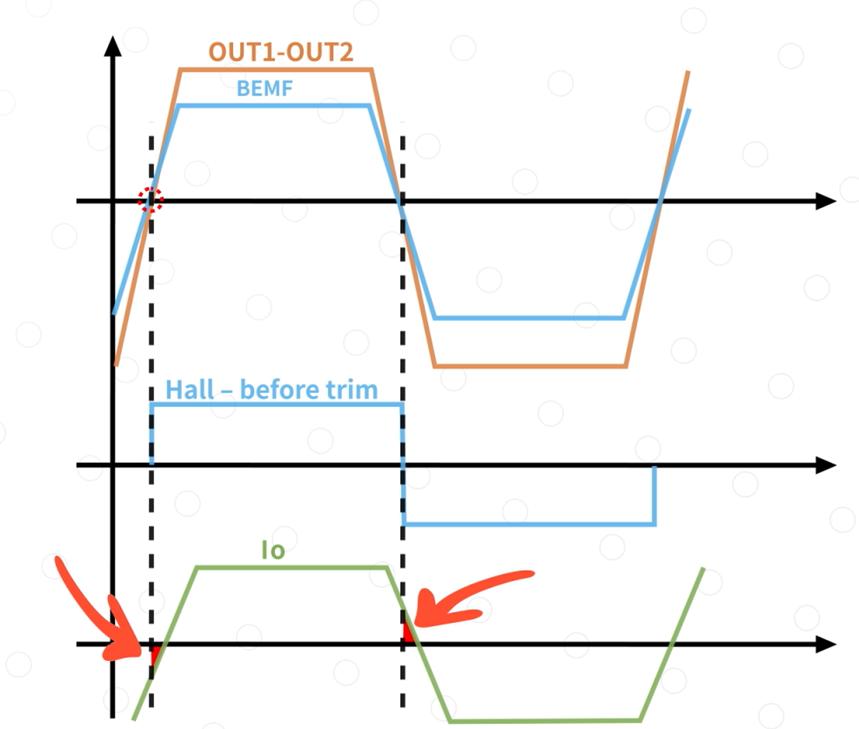
图6:单相风扇换相波形图
这个换相时的“负转矩”会大大影响风扇效率,同时,也会在换相时产生一定的电磁噪音,影响风扇的运行效果。
因此,为获得更大的电机转矩,提高风扇效率,有效优化换相时的噪音;应保证相电流和感应电动势在同相位,消除这个乘积里的负值部分,也就是说应该对霍尔切换的信号做一个超前的补偿,这个过程也叫做超前角控制。
03超前补偿过程
接下来,我们看看超前补偿的过程:
将霍尔角度提前,即霍尔高低电平切换提前,此时受换相信号控制的相等效电压OUT1-OUT2也提前进入过零点,随之,相电流Io也跟随相等效电压提前。这样,我们可以发现,只要补偿的超前角度合适,可以保证在补偿之后,Io和感应电动势能够位于相同相位,此时能够得到最大转矩。
此时从矢量图中,我们看到当Io跟随换相即霍尔信号的提前而旋转过一个合适的角度θ后,此时和感应电动势位于同相位,两项乘积达到最大值。
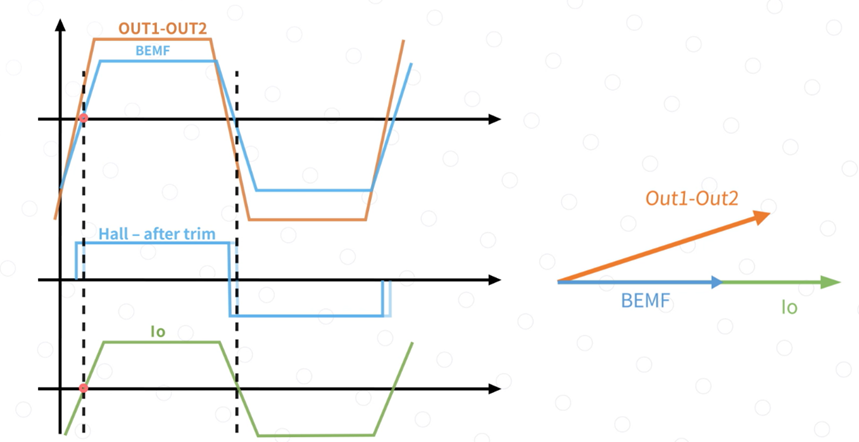
图7:超前补偿后的波形图和矢量图
以MP6653为例,这是一颗集成了霍尔传感器的35V/1.2A,单相风扇驱动IC,支持闭环控制方式且转速曲线可编程;

点击图片下载产品Datasheet
图8:MPQ6653特性与优势
在MP6653的规格书上,我们检索到该芯片内置的霍尔传感器,是位于3,4脚正中间的位置,因此,我们可以看到,在众多实际案例中,IC会摆放在相邻绕组之间靠近矽钢片大头的位置,正对矽钢片大头的边缘,而不是位于相邻绕组的正中间位置;这其实就是在实际案例中,做出的霍尔超前角控制。
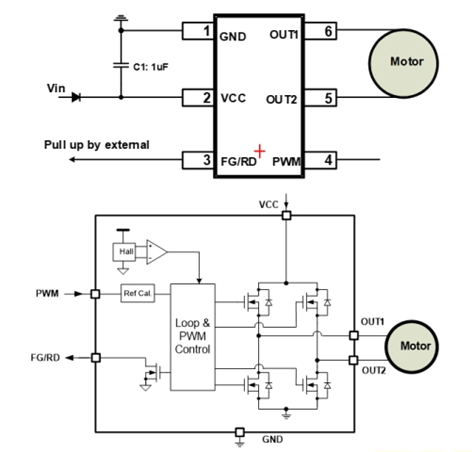

图9:实际案例中霍尔超前角控制摆放位置
当然,若我们在霍尔摆放的物理位置上有一些偏差,MPS针对每一颗风扇驱动物料也都有其对应的上位机软件,我们也可以通过在上位机中对霍尔超前/滞后角度进行微调,以补偿这个摆放偏差,以达到更高的效率和更好的噪音效果。
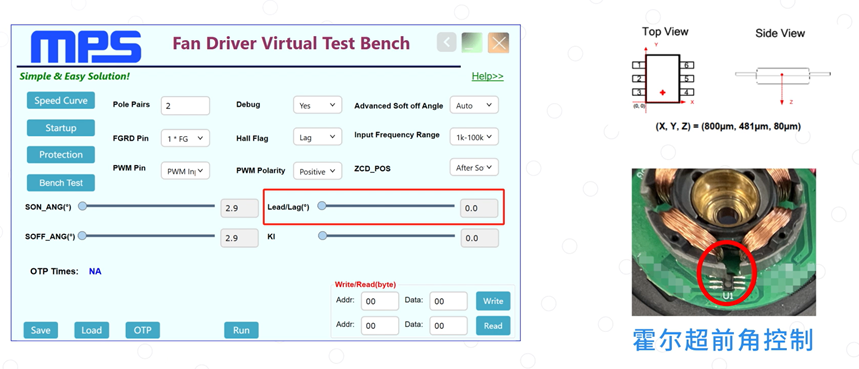
图10:通过MPS上位机对霍尔超前/滞后角度进行微调